Soluções de encoders da POSITAL FRABA para servos motores, garantindo precisão, qualidade e tecnologia.

O Servo motor é um motor elétrico rotativo que permite o controle preciso da posição angular, velocidade e aceleração. Consiste em um motor acoplado a um sensor que passa seu status de posição. Também requer um controlador relativamente sofisticado, geralmente um módulo projetado especificamente para uso com servomotores.
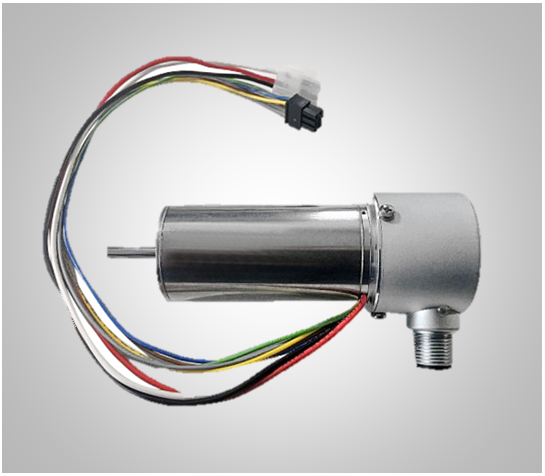
Servo Motor DC de escova

Os motores com escova são a forma mais simples de um servo motor. A construção do motor possui fios de cobre enrolados (formando uma bobina) no rotor e ímãs fixados no estator. As bobinas são energizadas no rotor para formar um campo rotativo que por sua vez faz com que as bobinas no rotor girem. Para que um campo rotativo ocorra no motor, a corrente do rotor deve ser alterada para bobinas ou enrolamentos adjacentes. Isso é feito através da escovação dos segmentos de comutação localizados no rotor do motor. A medida que o rotor gira, diferentes bobinas são energizadas através dos segmentos de escovas e comutação. Com a adição de um encoder, como o KCD Absolute Kit, ao eixo da cauda do motor DC, ele pode ser usado em um loop de servo controle e se tornar um servo motor DC.
Servo motor DC sem escova

Como o nome indica um servo motor DC, BLDC sem escova, não possui escovas ou segmentos de comutação para alternar a corrente através das bobinas para produzir um campo rotativo. O projeto do motor DC sem escovas é essencialmente invertido do servo motor DC, pois as bobinas do motor estão localizadas no estator e os ímãs permanentes estão localizados no rotor do motor. Esse tipo de projeto é benéfico, pois move o pesado fio de cobre do rotor e o substitui por ímãs permanentes muito mais leves. Isso reduz a inércia rotacional do rotor do motor, o que permite que o rotor acelere e desacelere significativamente mais rápido do que um motor DC de escova. No mundo do controle de movimento, a capacidade de acelerar e desacelerar um motor mais rapidamente gera uma máquina com desempenho muito maior.
A desvantagem dos motores DC sem escovas é que eles requerem alguma forma de sinais de comutação elétrica produzidos por sensores de efeito de hall ou um codificador com “faixas de hall”. Esses sinais fornecem dados de posição do rotor de volta ao acionamento do motor, de modo que o acionamento possa alternar a corrente através das bobinas do estator para causar um campo magnético rotativo.

Com o advento do codificador do kit Magnit Absolute Multiturn de baixo custo e alto desempenho, como a série KCD da POSITAL , os inversores estão se afastando dos “trilhos de comutação” tradicionais para usar as informações de posição do codificador absoluto para mudar as correntes de fase do motor sem escova. Ao usar o status absoluto do encoder, as informações de posição do encoder podem ser usadas para comutação do motor e controle de posição do loop do servo motor, garantindo precisão.




